 手機版|
手機版|

 關注公眾號|
關注公眾號|


 下載手機APP
下載手機APP目前起重機的起升電機都采用閉環矢量控制,具有定位精度高,機械特性硬,動態響應快,起動力矩大等優點,但這必須安裝軸編碼器采集電機的轉速信號,在很多老式門座機改造的現場,加裝軸編碼器困難很大,無法實現閉環矢量控制,然而英威騰CHV190系列起重提升專用變頻器采用開環矢量控制也能實現門座機平穩起制動,確保良好控制不溜鉤,本文就是一個CHV190在固定式門座機開環矢量控制改造的實例。
一、系統概述
固定式門座起重機是起重行業當中的一種典型設備,廣泛應用于倉庫、廠房、碼頭和露天貯料場等處。系統有提升、回轉、變幅三個機構,由于轉臺和支承固定于工作場所的土建基礎上,故沒有大車運行機構,不能實現整機的水平移動。
固定式門座機提升機構與普通門座機類似,上行、下放不允許產生“溜鉤”,性能上4HZ速度給定時,要求輸出至少150%的額定轉矩,功能上需有可靠的抱閘時序控制。
本項目GZ1620固定式起重機起升額定重量16噸,最大工作幅度20M,最小工作幅度7.5M,起升高度7M,起升工作速度33M/min,主要改造機構是雙起升機構,起升機構為兩臺55KW繞線式異步電動機,改造前為傳統繼電器接觸器控制線路,沒有PLC控制器,起升電機采用串電阻調速,通過逐級切除轉子電阻來實現多檔切換和起動電流限制,該調速方式可靠性低,噪音大,能耗高,故障停時長,機械抱閘由液壓制動器完成,當起升手柄回零,抱閘信號立即送出,沒有減速停車時間,抱閘沖擊很大,對金屬結構、機械傳動裝置以及制動器本身都容易造成損壞,鑒于以上不足,港口方面決定與我司合作,采用我司的CHV190系列變頻器對門座機的起升機構進行變頻調速改造。
二、改造技術方案
根據現場情況,加裝軸編碼器非常不易,而該門座機主要用于裝卸鋼卷、鋼絲條等件雜貨,對定位精度要求不高,客戶要求原有控制線路不做大規模變動,仍然保留原來的控制線路和連鎖保護,改動線路部分盡可能少,方便港方后續維護,于是我方決定采用如下改造方案:
1.采用2臺CHV190-075G-4+制動單元+制動電阻驅動2臺55KW繞線電機;
2.不配置異步PG卡,直接采取開關矢量控制;
3.制作兩臺變頻柜,配置斷路器,輸入輸出電抗器,控制變壓器,中間繼電器,電流互感器,指針電流表,指針電壓表,運行/故障指示燈等,安裝于原有開關柜旁邊,將開關柜電源線引到變頻柜進線端作為主電源,使原有連鎖保護仍然發揮作用;
4.拆除原有調速電阻器,安裝制動電阻箱;
5.將繞線電機轉子短接,作為鼠籠電機使用;
6.保留原切除電阻的接觸器,通過中間繼電器隔離處理作為變頻器多段速給定信號以及方向信號。
7.改造制動器控制方式,采用變頻器輸出繼電器端子作為制動器油泵電機接觸器的線圈控制信號,由變頻器實現減速停車,加速起動,松閘/抱閘,保證不溜鉤的同時避免對金屬結構的沖擊。
三、系統圖
改造前,采用串電阻調速,接觸器切換吸合實現正反轉,抱閘在運行信號消失的同時動作。
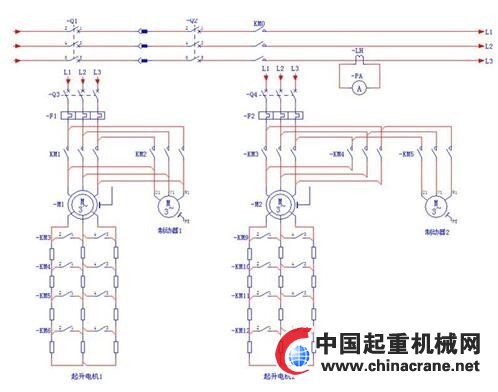
改造后,采用變頻器多段速功能調速,S曲線加減速運行,變頻器輸出繼電器控制抱閘。

四、調試過程
1.起升變頻器1調試過程
由于負載現場無法分開,設定電機基本參數后采用靜止自學習功能,參數見下表:

2.起升變頻器2參數調試
電機基本參數以及自學習參數

參數設定完畢后,兩臺電機進行空載試運行,1#變頻器空載電流35A,2#變頻器空載電流27A,吊掛12噸負載后2#電機出現提升力矩不夠的現象,提升開始瞬間開始下溜,調整2#變頻器參數P2.11為0.05,P2.14為31.4,2#電機回歸正常,吊掛16噸負載后,1#電機偶爾在提升重物過程中出現下溜,雖然不是每次都發生,但是客戶表示不能接受,于是我方調整1#變頻器P2.11為0.039,1#電機回歸正常。
3.記錄波形如下
1#變頻器波形


2#變頻器波形


五、結束語
起重機行業對變頻器的性能、功能有著較高的要求,傳統的閉環矢量控制對于改造項目,存在安裝編碼器困難,改動線路多,改造周期長等不利因素,英威騰CHV190系列變頻器的開環矢量控制在門座機上的成功應用,使傳統門座機變頻改造變得簡單易行。


















