 手機版|
手機版|

 關注公眾號|
關注公眾號|


 下載手機APP
下載手機APP為解決高壓線路人工帶電作業帶來的安全問題,運想重工利用Solidworks設計了高空帶電作業車機械手的絕緣機構、旋轉臺、機械臂、液壓機構、機械手末端、專用夾具等,通過分析機械手動作的實現原理及各部件的相互驅動關系,并利用Solidworks的運動仿真功能進行了取線、對準與接線、斷線工作的模擬分析。運想設計的該機械手可通過末端換刀裝置的切換滿足不同工作的需要,而且采用壓線夾方式接線使得接線安全可靠,另外操作人員不與高壓電線接觸,并距離接線位置數米以上,也保證了操作人員的絕對安全。
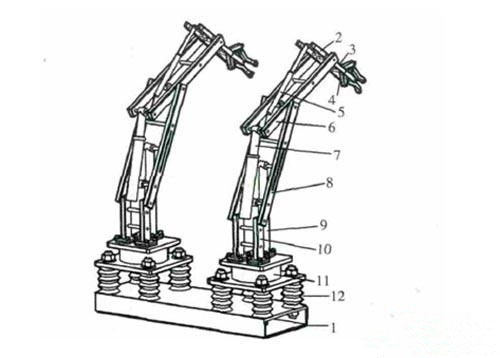
圖為高空帶電作業車機械手總裝配圖
圖解:1底座2.第一小臂3.第一末端機構液壓缸4.第一末端機構5第一小臂液壓缸6第一上臂7第一上臂液壓缸8.第一中臂9第一中臂液壓缸10.第一下臂11.第一旋轉臺12.絕緣部件
高空帶電作業車主要用于在供電系統不斷電的情況下,對高壓線路進行檢修、部件更換或測試等帶電作業,從而最大限度的減少因停電而造成的損失,同時又適合于一般的高空作業。過去幾十年里,帶電作業都是人工完成的,即人工帶電作業,人工帶電作業存在著許多缺陷,(1)帶電作業在實踐中存在安全方面的重大威脅,也給從業人員的心理造成很大的壓力;(2)帶電作業所需設備復雜,造價昂貴,對從業人員的技術水平和熟悉程度要求都很高,限制了人工帶電作業的發展;(3)從輸電線路的發展來看,為了減少線路走廊的空間,今后將會出現緊湊型桿塔的線路,這種類型的線路,會給人工帶電作業的安全帶來更大的困難。而使用機械手作業可以提高配電可靠性,提高帶電作業人員的人身安全,降低作業的勞動強度,提高帶電作業的自動化水平。
高空帶電作業車主要組成部分有拖動汽車及其底盤、升降系統、機械手、機械手設計的關鍵是高空帶電作業車機械手機構的設計。絕緣安全和專用夾具設計,基于SolidWorks設計的高空帶電作業車機械手主要由如下部分組成:底座、絕緣機構、旋轉臺、機械臂、液壓機構、機械手末端、專用夾具等,如圖所示:
機械手本體安裝于作業平臺上,共兩個機械手,每個機械手包括旋轉臺,8 個機械臂,4個液壓缸,一個機械手末端,8個夾具。機械手以主從遙控方式,利用機械手末端所攜帶的相應專用工具,可以完成10kw線路的帶電斷線、帶電接線、帶電修補導線、帶電更換絕緣子、帶電更換跌落開關、帶電更換避雷器等。并且,它所能完成10kw線路帶電作業工作的種類和質量跟機械手末端所攜帶的專用工具也是密切相關的.如攜帶斷線鉗時,可以剪斷導線;攜帶壓線鉗時,可以接線,機械手末端結構,如圖,所示.操作人員在絕緣斗內進行操作,采用人機交互智能控制技術來控制作業機械手完成相應的帶電作業工作。
















